
研究紹介
Finch:筋隆起センシングにより操作する対向3指の電動義手
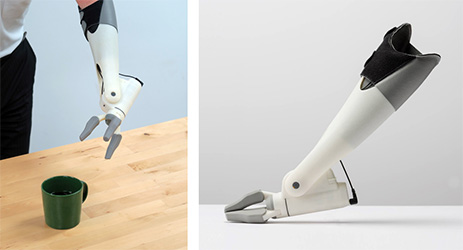
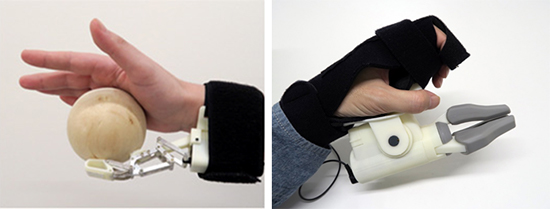
Finch(フィンチ)はシンプルな機構で高い機能性と操作性を実現する対向3指の電動義手です.様々な日用品を操作できる対向3指,採型不要で容易に着脱可能なサポータソケット,筋隆起センサで検出した筋隆起によって操作するシステムが特長です.実際に市販され,様々なユーザに使われています.
- 対向配置の3指により500g程度の日用品を把持・操作可能
- 総重量330g(ソケットを含む)
- 稼働時間:24時間程度(9Vリチウムイオン電池)
- 筋隆起センサによる操作システム(HACkberryにも採用)
- 採型不要で容易に着脱可能なサポータソケット
- 3Dプリンタを用いて製作可能
- Masahiro Yoshikawa, Kazunori Ogawa, Shunji Yamanaka, Noritaka Kawashima, "Finch: Prosthetic Arm with Three Opposing Fingers Controlled by a Muscle Bulge, " IEEE Transactions on Neural Systems & Rehabilitation Engineering, vol.31, pp.377-386, 2023.
- 吉川雅博, 田口裕也, 阪本 真, 山中俊治, 松本吉央, 小笠原司, 河島則天, "機能性とデザイン性を考慮した軽量・低コストの対向3指義手, "日本ロボット学会誌, vol.32, no.5, pp.456-463, 2014.
- Masahiro Yoshikawa, Yuya Taguchi, Shin Sakamoto, Shunji Yamanaka, Yoshio Matsumoto, Tsukasa Ogasawara, Noritaka Kawashima, "Trans-Radial Prosthesis with Three Opposed Fingers, " Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2013), pp.1493-1498, 2013
- 2016年"超"モノづくり部品大賞 健康・バイオ・医療機器部品賞
連携先:国立障害者リハビリテーションセンター研究所(運動機能系障害研究部),ダイヤ工業,東大生産研(山中研究室),大阪労災病院
先天性上肢形成不全児のためのモジュール式電動義手
成人用Finchを小型軽量化した小児用Finch,電動肘,電動肩,ソケットをモジュール化し,筋隆起センサを用いた操作システムと組み合わせて用いることで,前腕欠損,上腕欠損,肩欠損のすべてに対応可能な電動義手の実現を目指しています.成長に合わせたソケットの自動生成も研究しています.
- Toya Kobayashi, Masahiro Yoshikawa, Kazunori Ogawa, Satoko Ohmatsu, Noritaka Kawashima, "Compact and Lightweight Transradial Electric Prosthesis for Children with Forearm Deficiency," Proc. Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC2019), pp.6665-6668, 2019
- GUGEN2018 優秀賞(小林冬弥)
連携先:東大病院,田沢製作所,国立障害者リハビリテーションセンター研究所(運動機能系障害研究部)
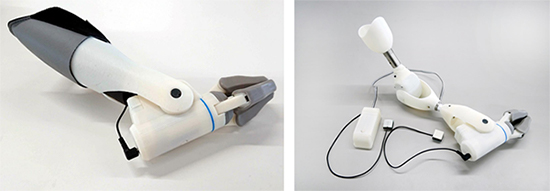
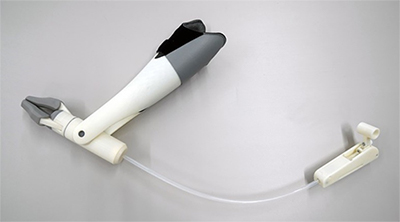
水圧アクチュエータにより駆動するFinch
水圧アクチュエータで駆動するFinchです.欠損肢側に装着する操作インタフェースのレバーを自身の体に押し当てることで水圧アクチュエータを駆動して3指の開閉を行います.水圧アクチュエータを用いることで,軽量化,水回りでの使用,無音での動作を実現しました.
- Yuma Yamanaka, Masahiro Yoshikawa, "A Prosthetic Hand with Three Opposing Fingers Driven by a Hydraulic Actuator," Proc. Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC2020), pp.4947-4950, 2020.
- 福祉機器コンテスト2019 学生部門優秀賞(⼭中佑真)
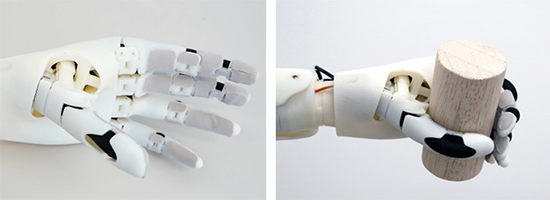
Rehand:リアルな外観の5指義手
Rehandは,3Dプリンタを活用して複雑な手の形状を再現した5指の義手です.受動的に関節を動かすタイプ,電動モータで把持を行うタイプ,上腕までカバーするタイプなど,様々なバリエーションがあります.触覚を備えるRehandも開発中です.

- Mizuki Sakuma, Yuki Kito, Yoshihiro Tanaka, Masahiro Yoshikawa, Noritaka Kawashima, "An Electric Cosmetic Prosthetic Hand with Vibrotactile Sense," Proc. Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC2020), pp.4963-4966, 2020.
- Narinobu Odagaki, Masahiro Yoshikawa, Yoshihiro Tanaka, Noritaka Kawashima, "Rehand II: Wire-Driven Five-Fingered Electric Prosthetic Hand Utilizing Elasticity of a Cosmetic Glove," Proc. Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC2019), pp.6661-6665, 2019.
- Masahiro Yoshikawa, Ryo Sato, Tsukasa Ogasawara, Noritaka Kawashima, "Rehand: Realistic Electric Prosthetic Hand Created with a 3D Printer," Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC2015), pp.2470-2473, 2015.
連携先:国立障害者リハビリテーションセンター研究所(運動機能系障害研究部),ダイヤ工業,佐藤技研,名古屋工業大学(Haptics Lab),畿央大学
F3Hand:湾曲型空気圧人工筋で駆動する5指義手
F3Handは空気圧で湾曲する空気圧人工筋を骨格に用いた5指義手です.様々な物体になじんで柔軟に把持できます.ソケットを含む総重量は250gで軽量で,空気圧駆動のため動作音も静かです.二重関節を採用し,スタイリッシュな外観を実現しました.
- Yusuke Nemoto, Kazunori Ogawa, Masahiro Yoshikawa, "F3Hand Ⅱ: A Flexible Five-Fingered Prosthetic Hand Using Curved Pneumatic Artificial Muscles," Proc. IEEE/SICE International Symposium on System Integration (SII2020), pp.99-104, 2020.
- Yusuke Nemoto, Kazunori Ogawa, Masahiro Yoshikawa, "F3Hand: A Five-Fingered Prosthetic Hand Driven with Curved Pneumatic Artificial Muscles," Proc. Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC2018), pp.1668-1671, 2018.
- James Dyson Award 2018 国内3位(根本裕介)
連携先:ダイヤ工業
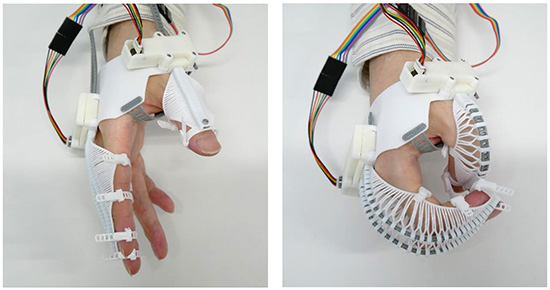
flexEXO:3Dプリントコンプライアント機構により把持を支援する手部外骨格
脳卒中やリウマチなど手指に機能障害がある方のための手部外骨格です.3DプリントしたTPU製の柔軟な外骨格は,ユーザの把持やリハビリを支援します.
- Kosuke Minamii, Masahiro Yoshikawa, "A Hand Exoskeleton With 3D-Printed Compliant Mechanisms to Assist Grasping," Proc. Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC2024), pp.1-4, 2024
- Takayuki Kodama, Masahiro Yoshikawa, Kosuke Minamii, Kazuhei Nishimoto, Sayuna Kadowak, Yuuki Inoue, Hiroki Ito, Hayato Shigeto, Kohei Okuyama, Kouta Maeda, Osamu Katayama, Shin Murata, Kiichiro Morita, "Investigating the Neural Mechanisms of Self-Controlled and Externally Controlled Movement with a Flexible Exoskeleton Using EEG Source Localization, " Sensors, vol. 25, no. 11, pp.1-28, DOI:10.3390/s25113527, 2025.
連携先:京都橘大学(Tk Lab)
exFinger:手指機能障害を支援する人体拡張デバイス
脳卒中やリウマチなど手指に機能障害がある方のための人体拡張デバイスです.手に装着して第3の手や指として用いることで,日用品の把持や操作が可能になります.
- Shotaro Funaki, Masahiro Yoshikawa, "Assistive Finger with an Adaptive Mechanism to Object Shape for Persons with Finger Dysfunction," Proc. IEEE International Conference on Systems, Man, and Cybernetics (SMC2020), pp.4288-4293, 2020.
連携先:ダイヤ工業
距離センサアレイによる前腕形状計測に基づく手の動作認識
Finchに用いられている距離センサをリング状に配置した距離センサアレイを用いて前腕の形状を計測し,変形情報から手の動作を推定する研究です.前腕の変形情報には,表層筋だけでなく深層筋の活動の活動も含まれており,筋電センサとは異なる情報を取得できます.動作の計測や操作インタフェースに応用できます.
- Sung-Gwi Cho, Masahiro Yoshikawa, Ming Ding, Jun Takamatsu, Tsukasa Ogasawara, "Machine-learning-based Hand Motion Recognition System by Measuring Forearm Deformation with a Distance Sensor Array, " International Journal of Intelligent Robotics and Applications, vol.3, no. 4, pp.418-429, DOI:10.1007/s41315-019-00115-1, 2019.
- Sung-Gwi Cho, Masahiro Yoshikawa, Ming Ding, Jun Takamatsu, Tsukasa Ogasawara, "Hand Motion Recognition Using a Distance Sensor Array," Proc. IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN2017), pp. 1459-1484, 2017.
- Sung-Gwi Cho, Masahiro Yoshikawa, Kohei Baba, Kazunori Ogawa, Jun Takamatsu, Tsukasa Ogasawara, "Hand Motion Recognition Based on Forearm Deformation Measured with A Distance Sensor Array," Proc. Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC2016), pp.4955-4958, 2016.
連携先:東京電気大学(趙崇貴先生)
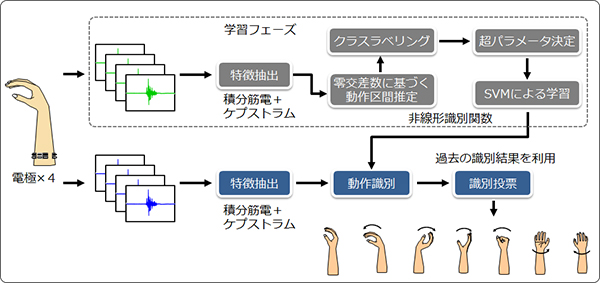
筋電位に基づく手の動作認識
脳の運動指令が筋肉に伝わり,筋肉が収縮する際,筋上に電気的な信号=筋電位が発生します.この筋電位は,皮膚表面から容易に計測可能です.この筋電位を利用して手の動作意図を推定する動作認識法を開発しています.本手法は,サポートベクターマシン(SVM)に基づいて構築しています.筋電義手やロボットハンドの制御を目的としています.腕だけでなく喉に装着した筋電センサで喉の動きを認識する研究を行っています.
- Makoto Sasaki, Kohei Onishi, Dimitar Stefanov, Katsuhiro Kamata, Atsushi Nakayama, Masahiro Yoshikawa, Goro Obinata, " Tongue Interface Based on Surface EMG Signals of Suprahyoid Muscles, " ROBOMECH Journal, vol.2016, no. 39, pp.289-300, DOI:10.1186/s40648-016-0048-0, 2016.
- 吉川雅博, 三田友記, 三河正彦, 田中和世, "前腕切断者を対象とした筋電位信号に基づく手の動作識別法に関する基礎的研究, "人間工学, vol.46, no.3, pp.197-207, 2010.
- 吉川雅博, 三河正彦, 田中和世, "筋電位を利用したサポートベクターマシンによる手のリアルタイム動作識別, "電子情報通信学会論文誌D, vol.J92-D, no.1, pp.93-103, 2009.
- Masahiro Yoshikawa, Masahiko Mikawa, Kazuyo Tanaka, "A Myoelectric Interface for Robotic Hand Control Using Support Vector Machine, " Proc.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2007), pp.2723-2728, 2007.
連携先:岩手大学(佐々木研究室)